robot end effector pdf
This is why each manufacturing robot needs an end effector. The end effector in this case should hold a drill as well as a sensor.

Multi Function End Effector Comau Pdf Catalogs Technical Documentation Brochure
Skip to Article Content.

. The robot uses the end-effector to accomplish a task. The same kind of tendons are used to transfer the force from the active joints to the passive ones. End effectors may consist of a gripper or a tool.
Manipulator electronic hardware and software. An end effector is a kind of tool holder which is placed at the end of a robot. This activity demonstates how an end effector is constructed to resemble a human hand.
Some examples of end. End effector system working with robot manipulator in two mode. Summary This chapter contains sections titled.
The end effector on the space shuttles. System of the driveline All actuators are connected to the active joints by the Nylon-Kevlar wire. Using April Tag to lacate the object and grasp or suck it.
The part of the robotic arm that grabs objects is called an end effector This wire-snare device is designed to fit over special grapple fixtures knobbed pins on the Shuttle ISS and ISS modules. End effectors can be part of the robots integral design or added-on to the base robot. Whatever the cause the consequences involve possible damage to the end effector or maybe even the robot itself.
Introduction Classification of EndEffectors Actuator System for EndEffectors Mechanical Hands Special Tools Universal Hands Practical Implementation. Other possible end effectors are machine tools like a drill or milling cutters. Full PDF Package Download Full PDF Package.
Robot Hands and EndEffectors. Designs for end effectors are as numerous as the applications employing robots. The effects might be classified into three categories.
There are many types of end-effectors for different types of applications. Appropriate end effector for. The center point of end -effector should remain as close as possible to the same location ie.
In this concept the interfaces are modelled as joints implying that the end-effector and part form a closed-loop mechanism. The end effector is like a mechanical hand with a cylinder 332 centimeters 1307 in in diameter by 258 centimeters 1016 in deep. Aside from the robot itself the most critical device in a robotic automation system is the end effector.
Skip to Article Information. This paper describes a capstone design project in developing an end -effector for robotic arm that is capable of grasping objects of varying sizes. Be able to compute the load.
End effectors are found at the end of the robots arm. Tools Grippers are end effectors used to. Basic grasping end effector forms are referred to as grippers.
Sometimes they are referred to as end-of-arm tooling or manipulator. Experiment shows that this end effector can perform the task of cutting and smashing branches within 1 cm. A straight -line path over the range of gripper motion.
97 44 Design and Implementation of Continuum Soft Robot End Effector. The robot uses the end-effector to accomplish a task. The design parameters are as follows.
Powered by four low-power motors to cut with its blade saw. In a wider sense an end effector is the part of a robot that interacts with the work environment. The task was to design an end effector.
Mechanical Engineering Laboratory. The object is suck by the suction. The gripping mechanism made use of the concept of a part-finger interface.
By definition an end effector is the device at the end of a robotic arm that allows it to interact with its environment. A short summary of this paper. INTRODUCTION Pruning is a cultivation technology that has great influence on the size flowering and production of fruit trees 1-3.
However a robot arm alone can hardly accomplish any job. Grippers to grasp and manipulate objects eg parts during work cycle Tools to perform a. Keywords - pruning robot end effector robot I.
End effectors are the piece of the robot that interacts with the parts or components in the environment. The end-effector may be holding a tool or the end-effector itself may be a tool. It is assumed that the sensor can detect the end-effector location and can guide it to the required location.
One of applications of industrial robots is spot welding in which Odes constitute the end effector of the robot. 43 Continuum Soft Robot End Effectors Basic Prototypes. 37 Full PDFs related to this paper.
A typical payload-to-weight ratio of a robot arm is about 120. This does not refer to the wheels of a mobile robot nor the feet of a humanoid robot which are not end-effectors because they are part of the robots mobility. End effectors are.
Hall University of Cincinnati 5. Human-Robot Interface for end effectors 161 4. Section 5-4 discusses the various end effectors was mentioned above that grippers are sometimes 1.
This activity demonstates how an end effector is constructed to resemble a human hand. Overload Protection When some unexpected event happens to the end effector such as a part becoming stuck in a die or a tool caught in a moving conveyor. Have students think of a job that an end effector could do and design an end effector for the job.
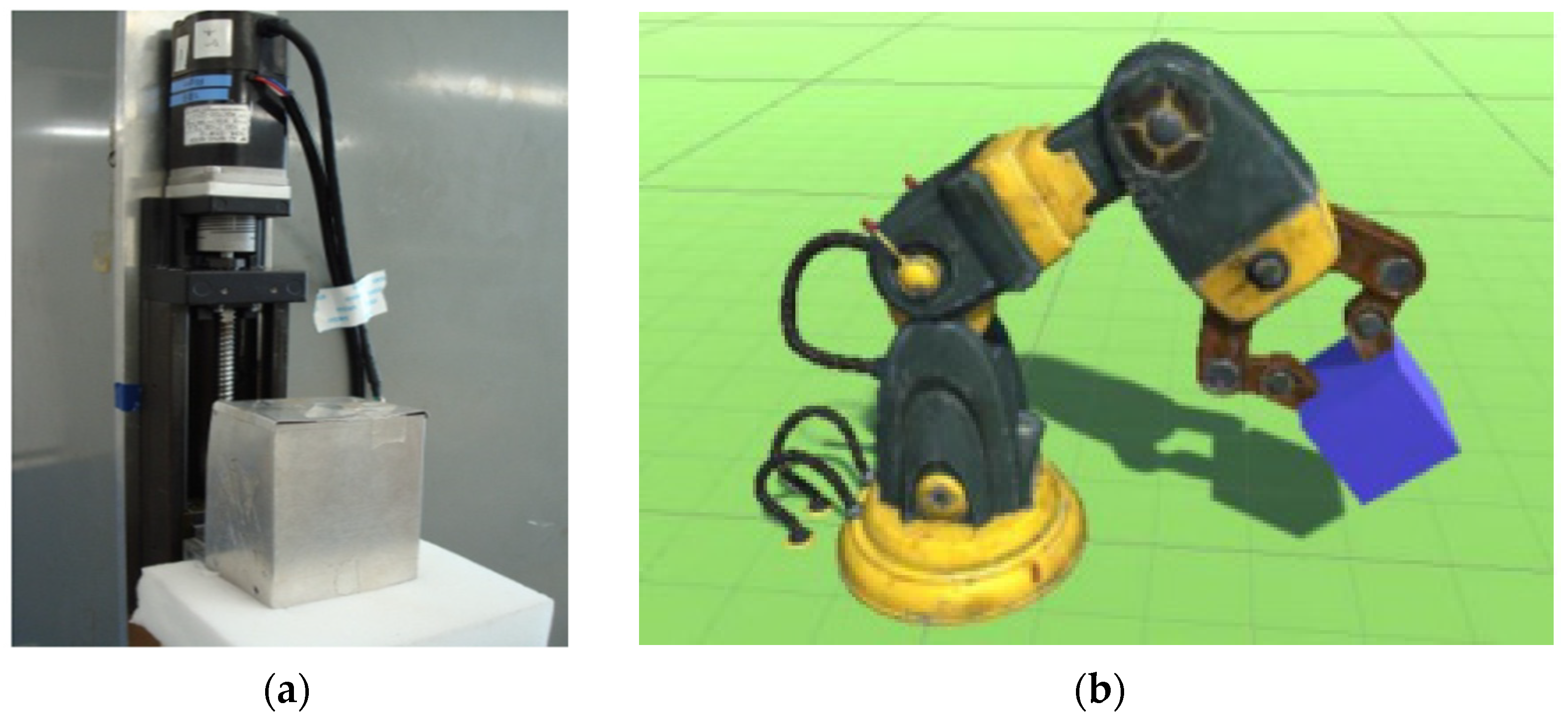
The drill that would be used in this project was a Desoutter CFD 1155398 which is a manual drill meant to be held by hand and not by a robot. A surgica robots end effector could be a scalpel or others tools used in surgery. Ziesmer 12 developed a reconfigurable end-effector shown in Figure 1b for in-hand manipulation without finger gaiting or regrasping.
End-effector sensing on the robot structure and its control. In this eBook you will find information on the different end effectors available on the market. End effector 5 Device that attaches to the wrist of the robot arm and enables the general-purpose robot to perform a specific task.
The end-effector may be holding a tool or the end-effector itself may be a tool. End effector on a robot manipulator platform UR5. 100 45 The Finger Kinematics in the Continuum Soft Robot End Effector.
The end effector could wrok well on the robot manipulator shown in Figure 7. Other aPplications in which tools are used as end effectors include dc welding. When referring to robotic end.
10182015 C 2001 Ernest L. 112 46 Control and Performance Evaluation of. The object is grasp by finger gripper.
Have students think of a job that an end effector could do and design an end effector for the job. The measurement of the robotic manipulator end-effector interaction forces can in certain cases be challenging especially when using robots that have a. ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 3.
Their undoubted advantage is a low friction coefficient and high tensile strength that is the ratio.

Robot End Effector Definition And Examples

Pdf Comparison Of Exoskeleton Robots And End Effector Robots On Training Methods And Gait Biomechanics Semantic Scholar

Pdf A Double Claw Robotic End Effector Design Semantic Scholar

Robot End Effector Pdf Manufactured Goods Machines
Machines Free Full Text A Review Of End Effector Research Based On Compliance Control Html

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping

Robot End Effector Wikiwand

A Reconfigurable Robotic End Effector For Machining And Part Handling Machine Tool Simulation Semantic Scholar

Pdf Robot End Effector Sensing With Position Sensitive Detector And Inertial Sensors Semantic Scholar

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping
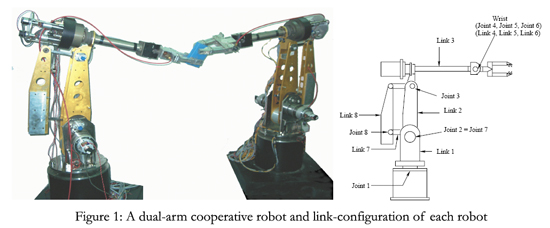
A Dual Arm Cooperative Robot

Robot End Effector Pdf Manufactured Goods Machines

Pdf End Effector For Fast Wire Cutting And Crimping On A 4dof Parallel Robot
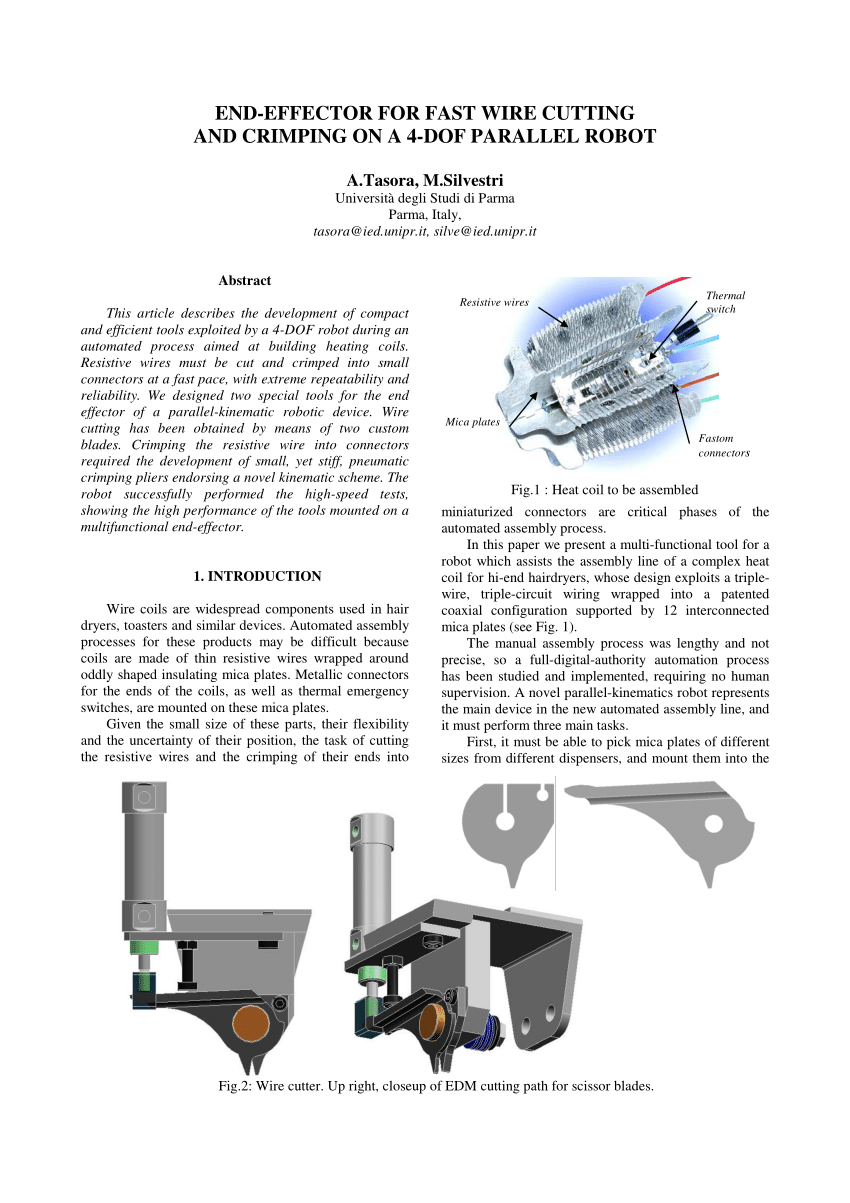
Pdf End Effector For Fast Wire Cutting And Crimping On A 4dof Parallel Robot

Robot End Effector Market Type Robot Type Application 2021 2030
Pdf Robotics 1 Lecture 7 End Effectors

Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy Robot Gripper Robot Arm Robot Design

Robot End Effector Definition And Examples

Pdf Robotics 1 Lecture 7 End Effectors